Using Time-Discrete Schemes¶
This tutorial covers the use of some time-discrete schemes available in Scimba for solving the rotating transport problem:
where: \(\mu = (v,c)\), \({\bf x} = (x, y)\), \(\Omega\) is the unit disk and
with initial condition
where
is the exact solution of the considered problem.
Scimba implements discrete PINNS, Neural Galerkin and Neural Semi-Lagrangian time discrete schemes; let us first define a pde implementing the rotating transport.
Model definition¶
We first define a class named RotatingTransport to model our problem. This class inherits from the abstract class TemporalPDE.
[1]:
from typing import Callable
import torch
from scimba_torch.approximation_space.abstract_space import AbstractApproxSpace
from scimba_torch.physical_models.temporal_pde.abstract_temporal_pde import TemporalPDE
from scimba_torch.utils.scimba_tensors import LabelTensor, MultiLabelTensor
class RotatingTransport(TemporalPDE):
def __init__(self, space: AbstractApproxSpace, a: Callable, f_ic: Callable):
self.space = space
self.a = a
self.f_ic = f_ic
def grad(self, w: torch.Tensor, z: torch.Tensor) -> torch.Tensor:
# returns the gradient of w with respect to z
return self.space.grad(w, z)
# the right hand side of the equation; w is the evaluation of the approximation at
# t, x, y, mu
def rhs(
self, w: MultiLabelTensor, t: LabelTensor, xy: LabelTensor, mu: LabelTensor
) -> torch.Tensor:
x, _ = xy.get_components()
return 0 * x
def bc_rhs( # the left hand side of the boundary conditions
self,
w: MultiLabelTensor,
t: LabelTensor,
xy: LabelTensor,
n: LabelTensor,
mu: LabelTensor,
) -> torch.Tensor:
x, _ = xy.get_components()
return 0 * x
def initial_condition( # the left hand side of the initial conditions
self, xy: LabelTensor, mu: LabelTensor
) -> torch.Tensor:
return self.f_ic(xy, mu)
def time_operator( # the time dependant part of the left hand side of the equation
self, w: MultiLabelTensor, t: LabelTensor, xy: LabelTensor, mu: LabelTensor
) -> torch.Tensor:
return self.grad(w, t)
# the space dependant part of the left hand side of the equation
def space_operator(
self, w: MultiLabelTensor, t: LabelTensor, xy: LabelTensor, mu: LabelTensor
) -> torch.Tensor:
grad_u = torch.cat(list(self.grad(w.get_components(), xy)), dim=1)
return torch.einsum("bi,bi-> b", self.a(t, xy, mu), grad_u)[..., None]
def operator( # already defined in TemporalPDE; given here for completeness
self, w: MultiLabelTensor, t: LabelTensor, xy: LabelTensor, mu: LabelTensor
) -> torch.Tensor:
return self.space_operator(w, t, xy, mu) + self.time_operator(w, t, xy, mu)
# Dirichlet condition: u(t, x, mu) = 0
def bc_operator( # the left hand side of the equation
self,
w: MultiLabelTensor,
t: LabelTensor,
x: LabelTensor,
n: LabelTensor,
mu: LabelTensor,
) -> torch.Tensor:
return w.get_components()
Now, we implement the exact solution, the initial condition and the advection vector field \(a\) with functions:
[2]:
def exact_solution(t: LabelTensor, xy: LabelTensor, mu: LabelTensor) -> torch.Tensor:
x, y = xy.get_components()
t_ = t.get_components()
c, v = mu.get_components()
x_t = torch.cos(2 * torch.pi * t_)
y_t = torch.sin(2 * torch.pi * t_)
return 1 + torch.exp(-0.5 / v**2 * ((x - c * x_t) ** 2 + (y - c * y_t) ** 2))
def initial_condition(xy: LabelTensor, mu: LabelTensor) -> torch.Tensor:
t = LabelTensor(torch.zeros((xy.shape[0], 1)))
return exact_solution(t, xy, mu)
def a(t: LabelTensor, xy: LabelTensor, mu: LabelTensor) -> torch.Tensor:
x, y = xy.get_components()
return torch.cat((-2 * torch.pi * y, 2 * torch.pi * x), dim=1)
We also define a geometric domain modeling \(\Omega\), a sampler on \(\Omega\) and specialize our problem to \(\mu = (0.3, 0.1)\).
[3]:
from scimba_torch.domain.meshless_domain.domain_2d import Disk2D
from scimba_torch.integration.monte_carlo import DomainSampler, TensorizedSampler
from scimba_torch.integration.monte_carlo_parameters import UniformParametricSampler
torch.random.manual_seed(0)
domain_x = Disk2D((0.0, 0.0), 1.0, is_main_domain=True)
domain_mu = [[0.3, 0.3], [0.1, 0.1]]
sampler = TensorizedSampler(
[
DomainSampler(domain_x),
UniformParametricSampler(domain_mu),
]
)
Solving the rotating transport problem with a discrete PINN¶
We first define a projection space to compute the numerical approximation as a generic MLP with 3 hidden layers of respective sizes 8, 16 and 8, and create a pde:
[4]:
from scimba_torch.approximation_space.nn_space import NNxSpace
from scimba_torch.neural_nets.coordinates_based_nets.mlp import GenericMLP
space0 = NNxSpace(1, 2, GenericMLP, domain_x, sampler, layer_sizes=[8, 16, 8])
pde0 = RotatingTransport(space0, a, initial_condition)
One must now define a projector to compute approximation at each time step; here we use a projector using a natural gradient descent algorithms, namely Energy Natural Gradient:
[5]:
from scimba_torch.numerical_solvers.temporal_pde.time_discrete import (
TimeDiscreteNaturalGradientProjector,
)
projector0 = TimeDiscreteNaturalGradientProjector(pde0)
One can now define a discrete PINN for the rotating transport problem as follows:
[6]:
from scimba_torch.numerical_solvers.temporal_pde.discrete_pinn import DiscretePINN
scheme0 = DiscretePINN(pde0, projector0, scheme="rk4")
Here we use 4-th order Runge-Kutta time integration scheme; other scheme available are explicit Euler ("euler_exp") and 2-th order Runge-Kutta ("rk2").
The first step is to project the initial solution onto the approximation space:
[7]:
scheme0.initialization(epochs=200, n_collocation=15_000, verbose=False)
Initialization: 100%|||||||||||| 200/200[00:06<00:00] , loss: 9.5e-01 -> 6.7e-09
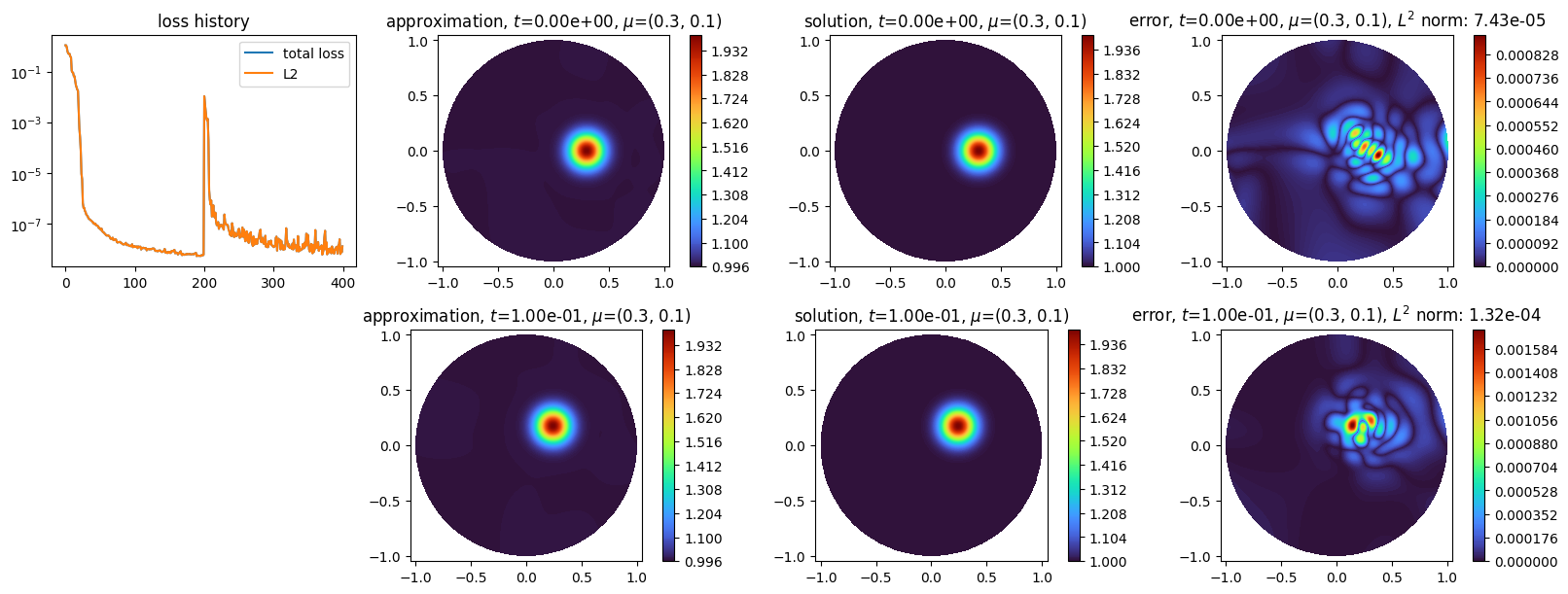
We choose time-steps of \(0.02\) to get an approximation of a solution for \(t = 0.1\):
[8]:
scheme0.solve(dt=0.02, final_time=0.1, epochs=20, n_collocation=15_000, verbose=False)
Time loop: 100%|||||||||||||||||||||||||||||||||||||||||| 0.1/0.1 [00:22<00:00]
and plot the approximated solution, the exact solution and the error absolute:
[9]:
import matplotlib.pyplot as plt
from scimba_torch.plots.plot_time_discrete_scheme import plot_time_discrete_scheme
plot_time_discrete_scheme(
scheme0,
solution=exact_solution,
error=exact_solution,
)
plt.show()
by default, the space approximating the initial condition and the solution for one intermediate time is saved and displayed; this can be adjusted by using optional argument nb_keep of the solve method as demonstrated below.
Solving the rotating transport problem with the Neural Galerkin approach¶
We create an approximation space, a pde object and a projector as previously:
[10]:
from scimba_torch.approximation_space.nn_space import NNxSpace
from scimba_torch.neural_nets.coordinates_based_nets.mlp import GenericMLP
from scimba_torch.numerical_solvers.temporal_pde.time_discrete import (
TimeDiscreteNaturalGradientProjector,
)
space1 = NNxSpace(1, 2, GenericMLP, domain_x, sampler, layer_sizes=[8, 16, 8])
pde1 = RotatingTransport(space1, a, initial_condition)
projector1 = TimeDiscreteNaturalGradientProjector(pde1)
then the Neural Galerkin solver with 4-th order Runge-Kutta time integrator is defined and initialized with
[11]:
from scimba_torch.numerical_solvers.temporal_pde.neural_galerkin import NeuralGalerkin
scheme1 = NeuralGalerkin(pde1, projector1, scheme="rk4")
scheme1.initialization(epochs=200, n_collocation=15_000, verbose=False)
Initialization: 100%|||||||||||| 200/200[00:06<00:00] , loss: 1.2e+00 -> 1.7e-08
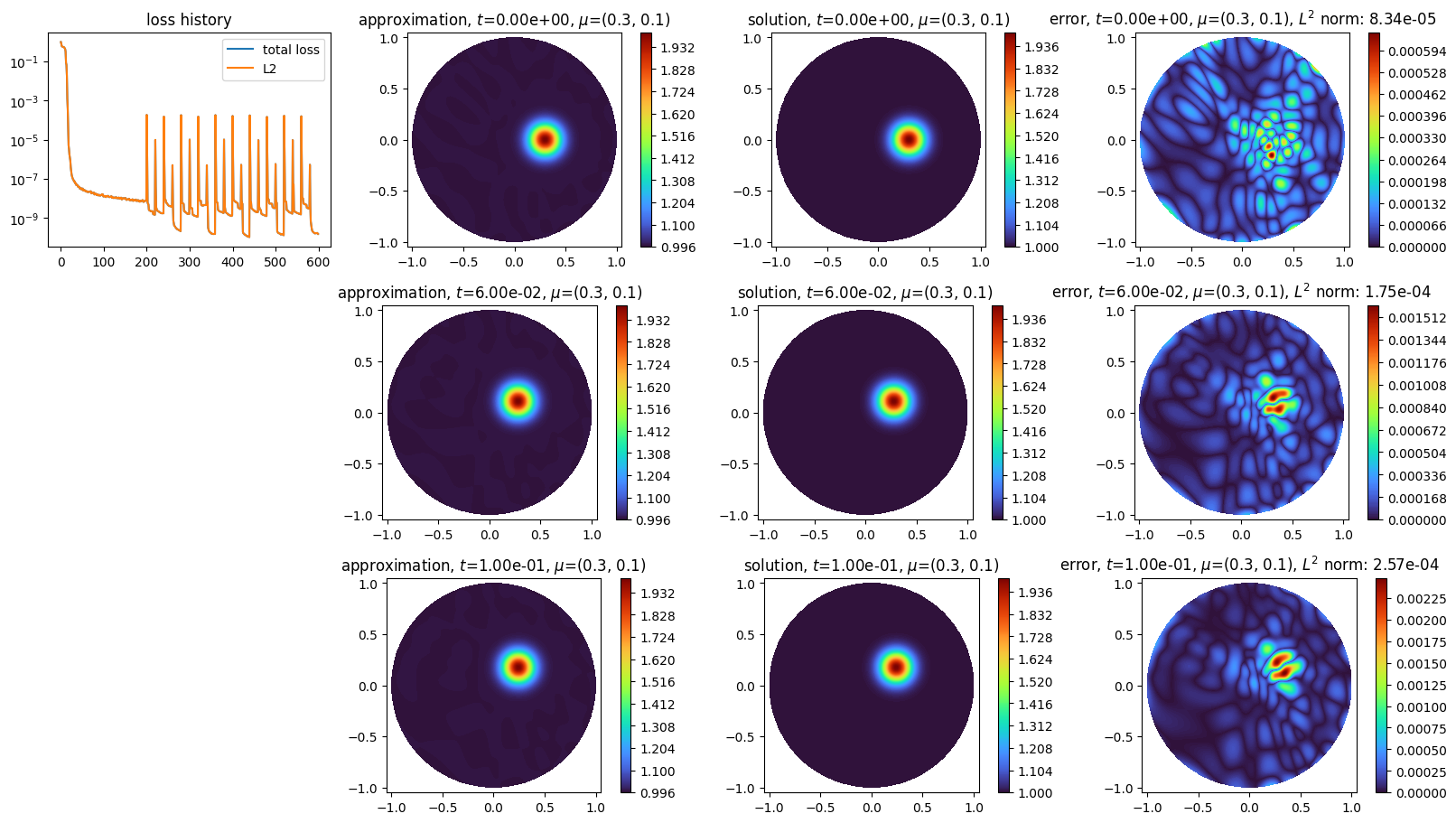
We choose time-steps of \(0.02\) to get an approximation of a solution for \(t = 0.5\):
[12]:
scheme1.solve(dt=0.02, final_time=0.5, verbose=False, nb_keep=2)
Time loop: 100%|||||||||||||||||||||||||||||||||||||||||| 0.5/0.5 [00:00<00:00]
[13]:
import matplotlib.pyplot as plt
from scimba_torch.plots.plot_time_discrete_scheme import plot_time_discrete_scheme
plot_time_discrete_scheme(
scheme1,
solution=exact_solution,
error=exact_solution,
)
plt.show()
Notice the use of the optional argument nb_keep in the solve method to keep more than one intermediate approximated solution.
Solving the rotating transport problem with the Neural Semi-Lagrangian approach¶
As Neural Semi-Lagrangian approach is defined for advection diffusion problems, the class modeling the problem needs a flag specifying wether the advection is constant or not:
[14]:
class RotatingTransport(RotatingTransport):
def __init__(self, space: AbstractApproxSpace, a: Callable, f_ic: Callable):
super().__init__(space, a, f_ic)
self.constant_advection = False
We create an approximation space, a pde object and a projector as previously:
[15]:
from scimba_torch.approximation_space.nn_space import NNxSpace
from scimba_torch.neural_nets.coordinates_based_nets.mlp import GenericMLP
from scimba_torch.numerical_solvers.temporal_pde.time_discrete import (
TimeDiscreteNaturalGradientProjector,
)
space2 = NNxSpace(1, 2, GenericMLP, domain_x, sampler, layer_sizes=[8, 16, 8])
pde2 = RotatingTransport(space2, a, initial_condition)
projector2 = TimeDiscreteNaturalGradientProjector(pde2)
In order to apply semi-lagrangian, one needs first to generate the characteristic curves, which is done in Scimba with the class Characteristic:
[16]:
from scimba_torch.numerical_solvers.temporal_pde.neural_semilagrangian import (
Characteristic,
NeuralSemiLagrangian,
)
characteristic = Characteristic(pde2)
One can now define a neural semi-lagrangian solver with this characteristic and initialize it:
[17]:
scheme2 = NeuralSemiLagrangian(characteristic, projector2)
scheme2.initialization(epochs=200, n_collocation=15_000, verbose=False)
Initialization: 100%|||||||||||| 200/200[00:05<00:00] , loss: 1.4e+00 -> 2.4e-08
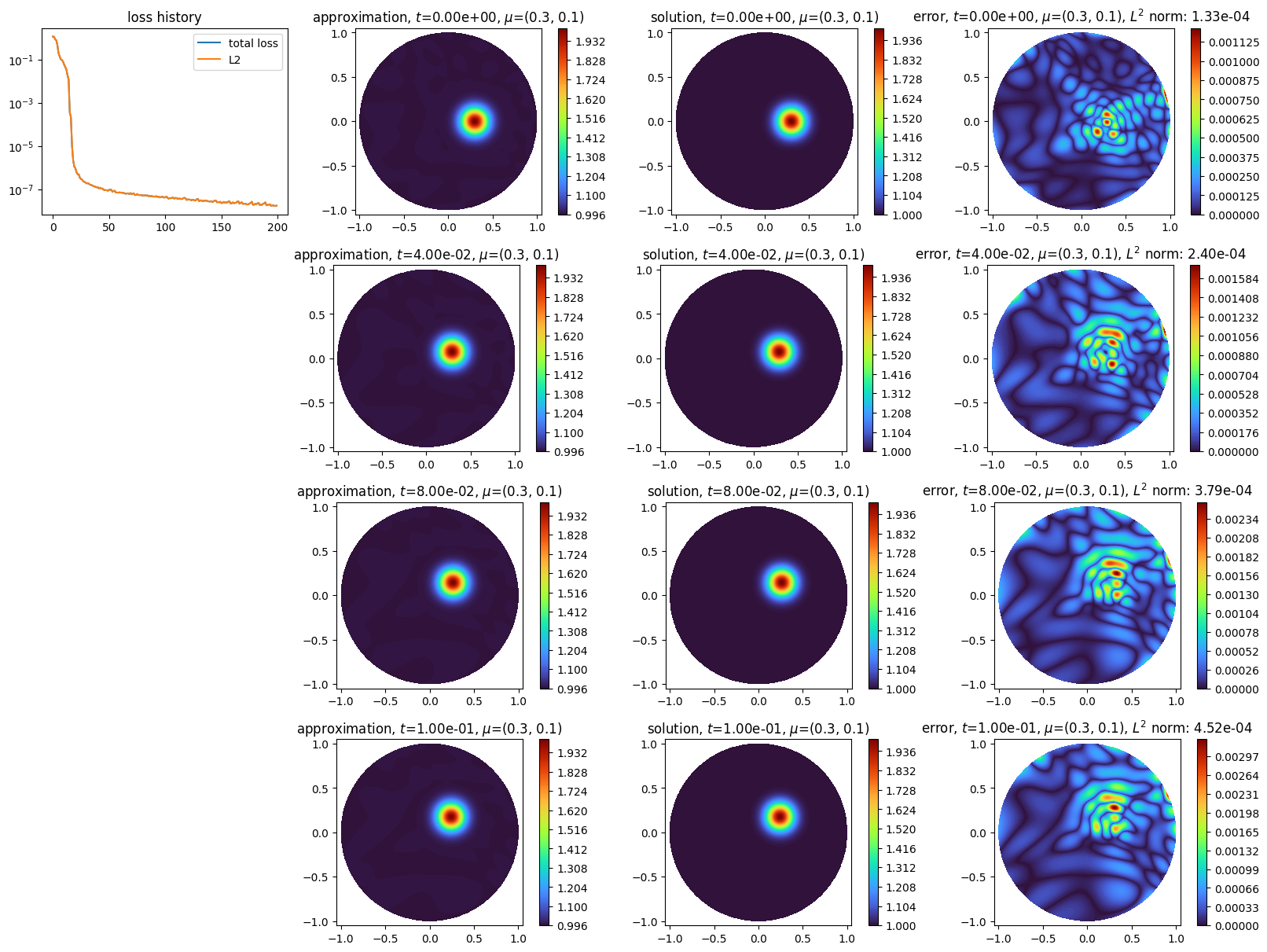
With neural semi-lagrangian, one can use much wider time steps than with previous methods:
[18]:
scheme2.solve(dt=0.25, final_time=0.5, epochs=200, verbose=False)
Time loop: 100%|||||||||||||||||||||||||||||||||||||||||| 0.5/0.5 [00:05<00:00]
[19]:
import matplotlib.pyplot as plt
from scimba_torch.plots.plot_time_discrete_scheme import plot_time_discrete_scheme
plot_time_discrete_scheme(
scheme2,
solution=exact_solution,
error=exact_solution,
)
plt.show()
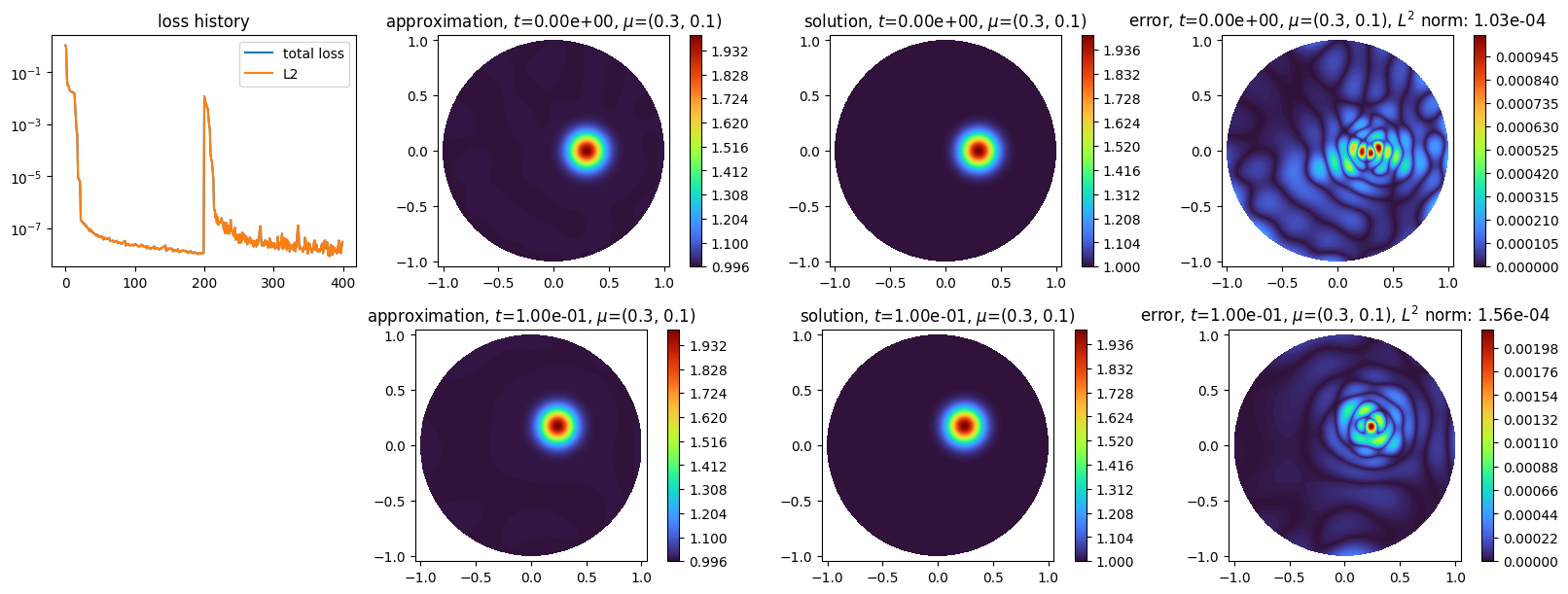
We finally show how to use an exactly defined characteristic curve in the neural semi-lagrangian solver; in the rotating transport example it is:
[20]:
def exact_foot(
t: torch.Tensor, xy: LabelTensor, mu: LabelTensor, dt: float
) -> torch.Tensor:
x, y = xy.get_components()
arg = 2 * torch.pi * t
c_n = torch.cos(arg)
s_n = torch.sin(arg)
k1 = x * s_n + y * c_n
k2 = x * c_n - y * s_n
arg_np1 = 2 * torch.pi * (t + dt)
c_np1 = torch.cos(arg_np1)
s_np1 = torch.sin(arg_np1)
x_np1 = k1 * s_np1 + k2 * c_np1
y_np1 = -k2 * s_np1 + k1 * c_np1
return torch.cat((x_np1, y_np1), dim=1)
One can now create the Characteristic object with this exact definition, and apply the solver as previously:
[21]:
space3 = NNxSpace(1, 2, GenericMLP, domain_x, sampler, layer_sizes=[8, 16, 8])
pde3 = RotatingTransport(space3, a, initial_condition)
projector3 = TimeDiscreteNaturalGradientProjector(pde3)
# use the exact definition of the characteristic curve:
characteristic = Characteristic(pde3, exact_foot=exact_foot)
scheme3 = NeuralSemiLagrangian(characteristic, projector3)
scheme3.initialization(epochs=200, n_collocation=15_000, verbose=False)
Initialization: 100%|||||||||||| 200/200[00:05<00:00] , loss: 1.2e+00 -> 1.3e-08
[22]:
scheme3.solve(dt=0.25, final_time=0.5, epochs=200, verbose=False)
Time loop: 100%|||||||||||||||||||||||||||||||||||||||||| 0.5/0.5 [00:03<00:00]
[23]:
import matplotlib.pyplot as plt
from scimba_torch.plots.plot_time_discrete_scheme import plot_time_discrete_scheme
plot_time_discrete_scheme(
scheme3,
solution=exact_solution,
error=exact_solution,
)
plt.show()